
Velocidad y precisión nunca antes vistas: el robot Astribot S1 es un rayo
Desde la capacidad de abrir vino hasta la delicadeza de cortar un pepino, el humanoide s1 muestra una precisión y velocidad impresionantes

Desde la capacidad de abrir vino hasta la delicadeza de cortar un pepino, el humanoide s1 muestra una precisión y velocidad impresionantes

Con una duración de batería de 10 horas y un sofisticado sistema de navegación, este pingüino robot está listo para redefinir los estándares submarinos.

El máximo ejecutivo de Amazon está seguro de ello: "La tecnología no elimina puestos de trabajo, sino que crea oportunidades". ¿Tiene razón o no?

Apple se centra en los robots domésticos para abrir nuevos horizontes comerciales. Proyectos ultrasecretos y un equipo dedicado a probar innovaciones.
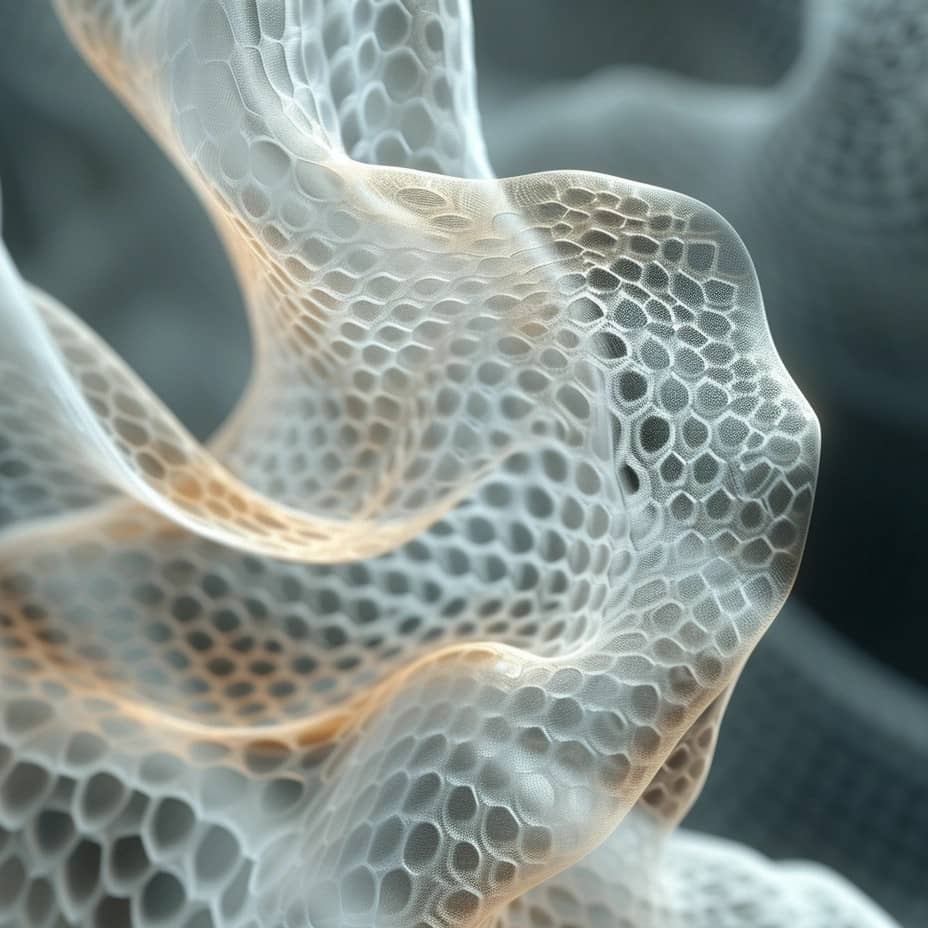
Metafluido programable creado con perlas elastoméricas: viscosidad, compresibilidad y propiedades ópticas modificables. Aplicaciones en robótica y óptica.
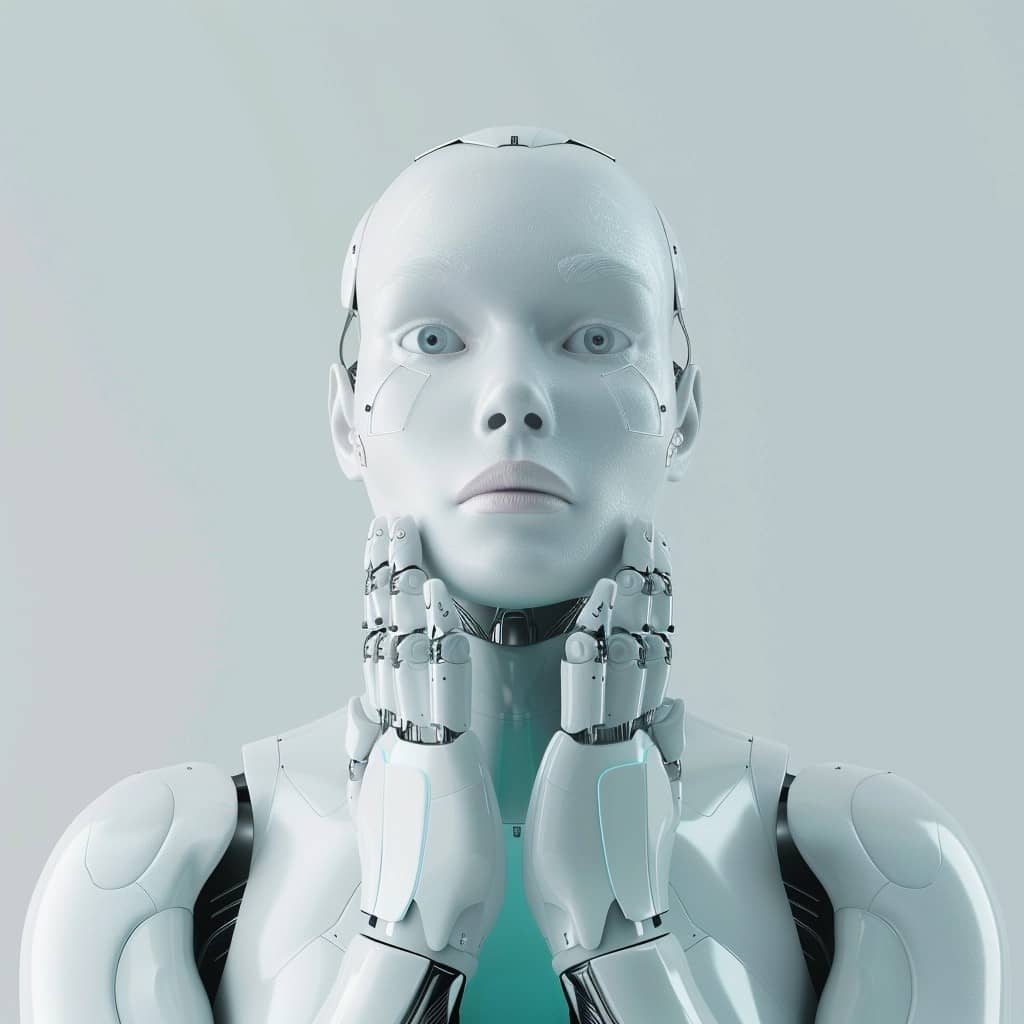
Para la encarnación, se necesita un cuerpo físico para lograr la inteligencia humana. Esta es la razón por la que las empresas están "incorporando" la IA en los robots.

El robot humanoide utiliza IA para predecir y replicar sonrisas humanas. Y sonríe antes, haciendo que las interacciones sean más naturales.
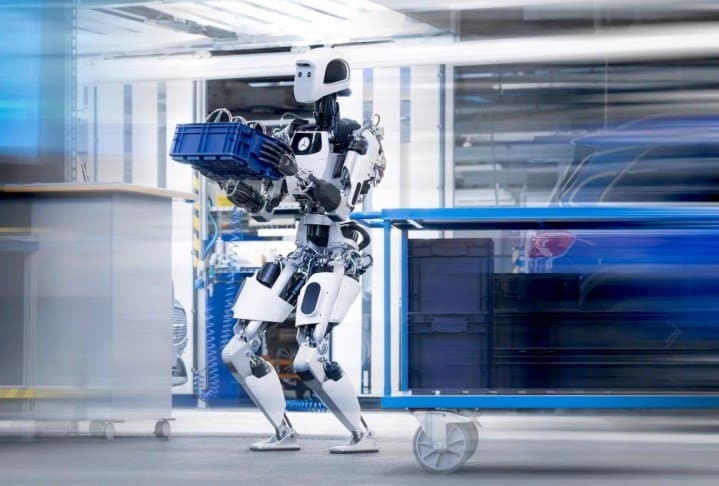
Mercedes-Benz colaborará con Apptronik para probar el uso del robot humanoide Apollo en la fábrica, para ayudar a los trabajadores en trabajos repetitivos y físicamente exigentes.

El Crawfish, un nuevo camarón robot experimental, muestra un gran potencial en el sector de las energías renovables marinas.

Los cirujanos robóticos prometen cirugías menos invasivas y una recuperación más rápida, pero su impacto real aún no se ha demostrado y su costo sigue siendo una barrera para muchos hospitales.

El nuevo robot humanoide de Unitree puede caminar, o más bien correr, a 12 kilómetros por hora, recorriendo 10 kilómetros en 50 minutos sin cansarse. Cada récord aplastado.

Verdie es un robot jardinero con IA capaz de realizar muchas tareas de forma autónoma. Parece gracioso, pero habla muy en serio.

Caltech desarrolla medusas biónicas para explorar océanos a una velocidad 4,5 veces más rápida, llevando instrumentos científicos
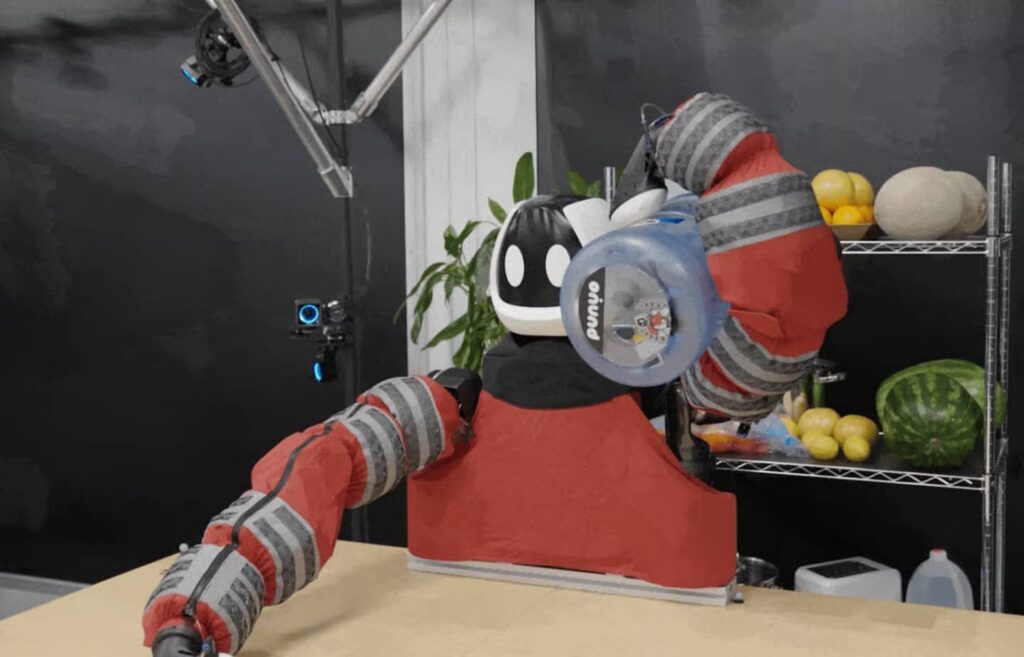
Con un diseño inspirado en Baymax de Big Hero 6, Punyo utiliza sensores táctiles y 'patas' inflables para abrazar y transportar objetos.

La startup noruega 1X presenta sus robots Eve en acción. Sin bipedalismo ni manos complejas, pero sí mucha eficacia a la hora de recoger objetos, ordenar e incluso abrir puertas. ¿El futuro del trabajo está sobre ruedas?
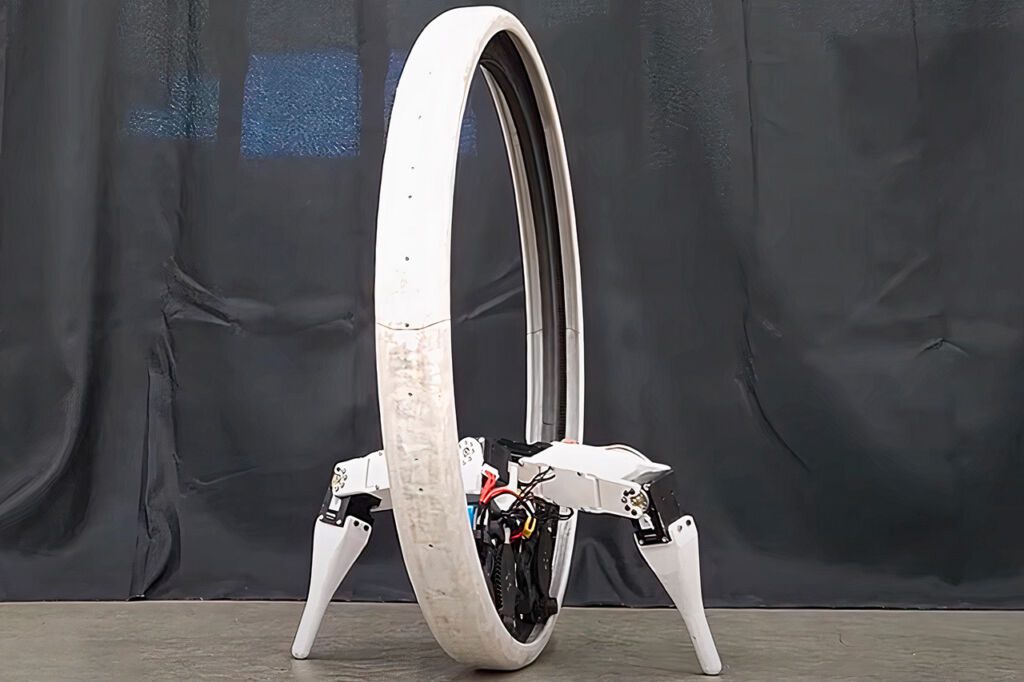
Este robot de una sola rueda puede representar una interesante opción para la movilidad urbana: compacto, eficiente y autónomo si es necesario.
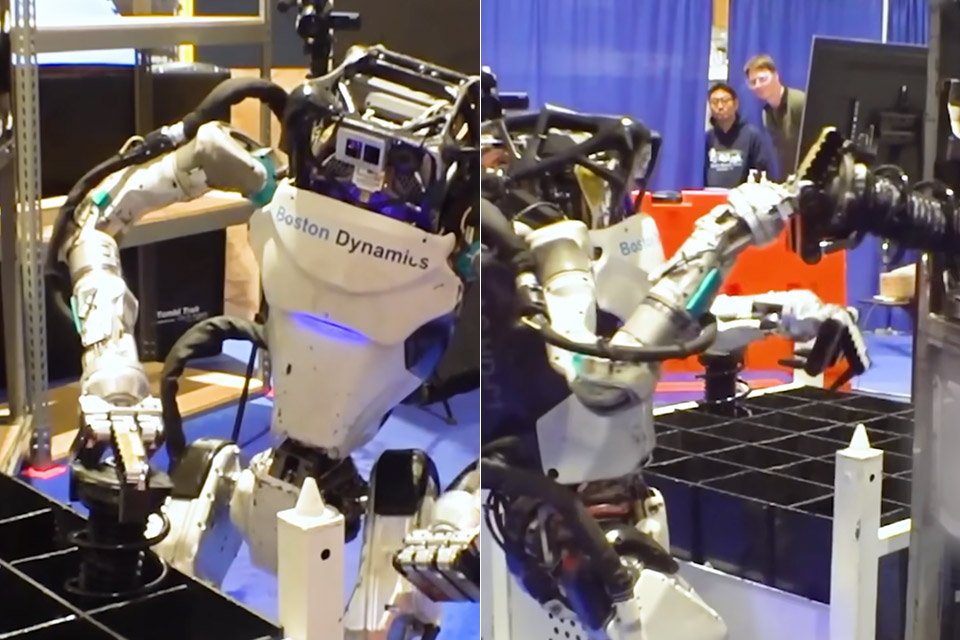
La última actualización del Atlas de Boston Dynamics incluye el reconocimiento y la manipulación de objetos pesados: el potencial para el sector industrial es gigantesco

Desde un simple asistente hasta una cómoda silla y un espacio de trabajo personal, el concepto de Choi abre nuevas fronteras en la robótica de servicios.

ABS, un nuevo control para robots cuadrúpedos, asegura una locomoción ágil y sin colisiones en entornos concurridos, tanto en interiores como en exteriores
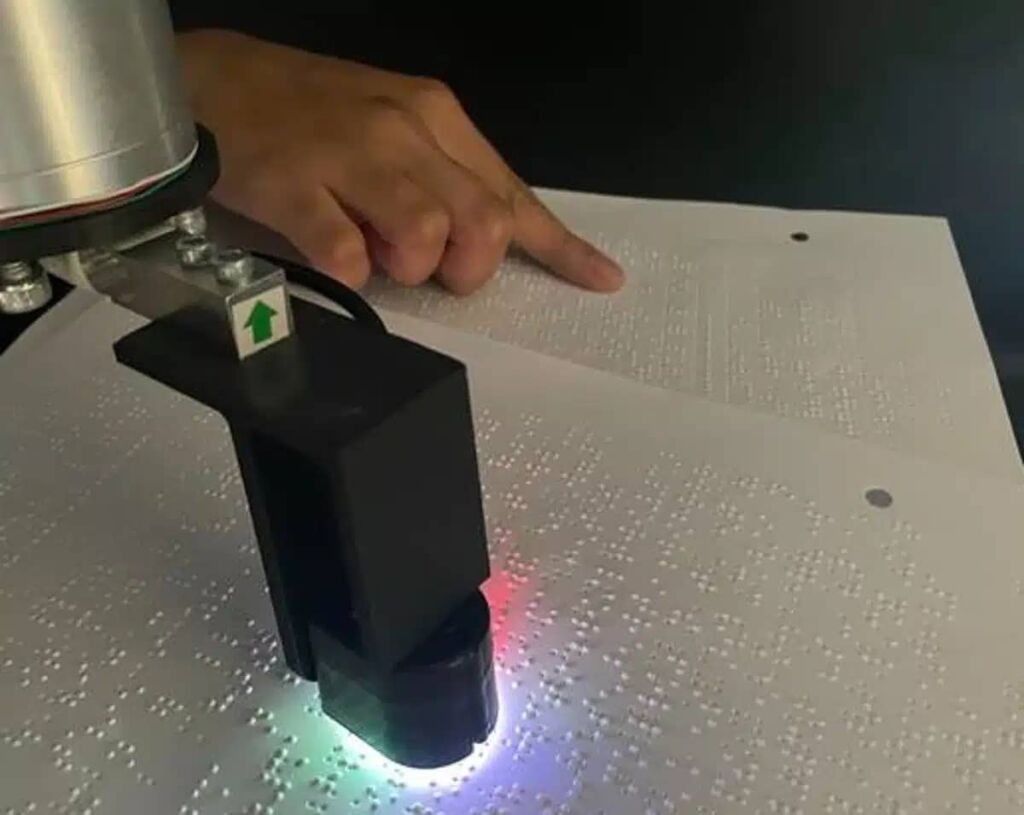
Una investigación desarrolla un sensor robótico para leer braille, un avance significativo en la imitación de las capacidades táctiles humanas.

Knightscope presenta los robots guardianes: un gran avance en seguridad e inteligencia artificial. No es el primer intento y no disipa los temores.

Alberto Robiati y Gianluca Riccio guían a los lectores a través de escenarios del futuro: las oportunidades, riesgos y posibilidades que tenemos para crear un mañana posible.
Noticias sobre el mundo del mañana.
Brindamos novedades sobre el futuro de la tecnología, la ciencia y la sociedad: si hay algo que está por llegar, es que ya llegó aquí.
Categorías
Ediciones de idiomas
© 2024 Futuropróssimo -  Este trabajo se distribuye bajo licencia Creative Commons Reconocimiento 4.0 Internacional.
Este trabajo se distribuye bajo licencia Creative Commons Reconocimiento 4.0 Internacional.