
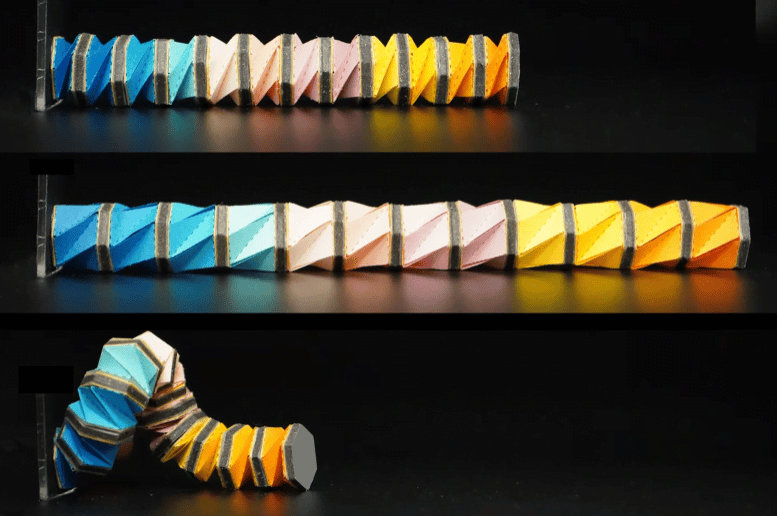
En su forma alargada, este brazo robótico parece un acordeón que se puede expandir y plegar sobre sí mismo de manera efectiva para miles de aplicaciones.
Este diseño, descrito en detalle en un nuevo estudio publicado en la revista PNAS, está inspirado en el tentáculo del pulpo e imita la forma en que estira, tuerce y manipula objetos. Sus creadores esperan que pueda integrarse en aplicaciones biomédicas para ayudar en procedimientos u operaciones invasivas, como insertar un tubo de respiración por la boca o aplicar un catéter.
"El sistema nervioso del pulpo se encuentra en sus tentáculos", dice. Ruike Renée Zhao, profesor asistente de ingeniería mecánica en la Universidad de Stanford y autor del nuevo artículo.
Lo que estamos haciendo aquí es imitar su sistema de brazos altamente inteligente. Debido a que los tentáculos de un pulpo son tan versátiles que podrían tener cientos, miles de movimientos diferentes para interactuar con los objetos.
Ruike Renée Zhao, Universidad Stanford
Cómo se fabrica el nuevo brazo robótico inspirado en el pulpo
El nuevo brazo robótico debe su flexibilidad a algunas características clave, incluidos los movimientos impulsados por un campo magnético en lugar de motores, paneles inspirados en origami y un exoesqueleto suave.
El pulpo "origami"
Una serie de pequeños segmentos forman un solo brazo de este robot blando. Dentro de cada segmento, dos placas hexagonales de silicona blanda engastadas con partículas magnéticas en paneles de plástico inclinados diseñados con un patrón de origami kresling, un estilo de origami que se retuerce para estirarse y contraerse. La forma de los paneles permite que el brazo se extienda en un tubo o se contraiga en su configuración comprimida, al igual que los tentáculos del pulpo.
Debido a las placas magnetizadas en todo el brazo, el pulpo robótico se puede operar de forma remota utilizando un fuerte campo magnético, algo parecido a los creados dentro de un escáner de resonancia magnética. Durante las fases de prueba, los investigadores utilizaron bobinas electromagnéticas para crear un campo magnético tridimensional alrededor del brazo. Al ajustar la dirección del campo magnético alrededor del brazo, puedo guiar el movimiento y la deformación de las unidades de origami individuales. El diseño también permitió a los investigadores controlar cada segmento del brazo de forma independiente para afinar los movimientos.
Al controlar el campo magnético externo, podemos controlar el alargamiento, la flexión y otras combinaciones. Podríamos comprobar el punto exacto a partir del cual el robot pulpo comienza a doblarse.
Ruike Renée Zhao, Universidad Stanford
Extraordinaria versatilidad
Es posible personalizar todo en el brazo, desde la fuerza de magnetización, hasta las dimensiones, los materiales con los que está hecho, hasta la cantidad de unidades que lo componen.
La capacidad de conseguir un robot que se pueda mover sin la necesidad de incorporar motores es un factor absolutamente increíble. Le permite reducir realmente el tamaño de todo el sistema de robot "pulpo" al mínimo y aumentar drásticamente las posibles aplicaciones.

